
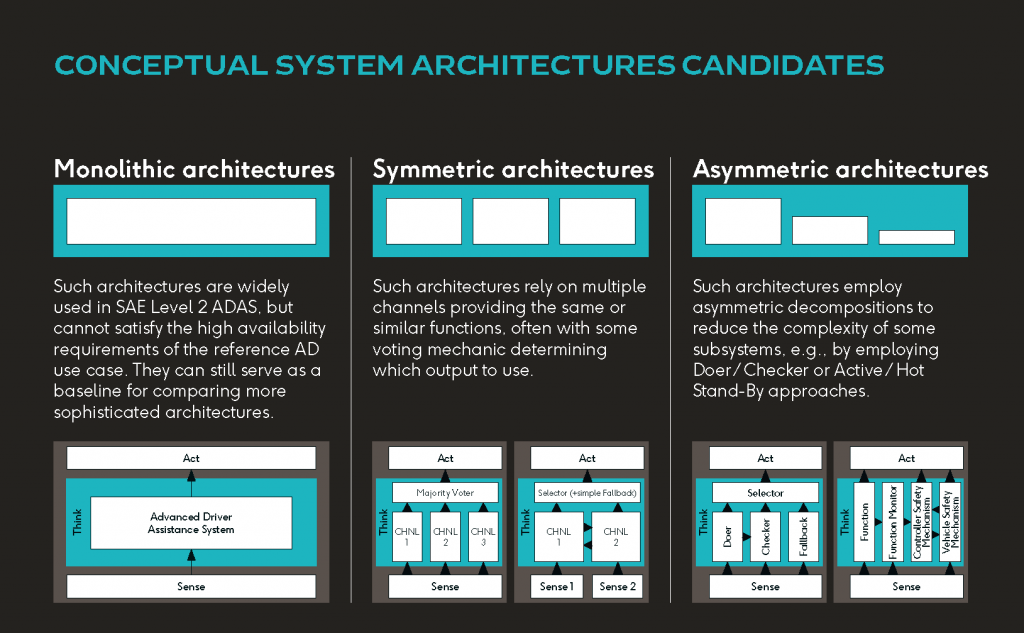
The Autonomous first Working Group Safety & Architecture recently reached a significant milestone by successfully completing the second report increment. The members evaluated and identified 3 different architecture categories suitable for Level 4 autonomous driving.
Launched in June 2021, The Autonomous Working Group Safety & Architecture brings together diverse companies and academia to define the state-of-the-art system architecture for safe self-driving cars, and more precisely, for an SAE Level 4 Highway Pilot.
In this post, we interviewed various Working Group Members representing different companies in the automotive industry on their most recent developments and collaborative work in completing one of the most critical parts: identifying and analyzing various system architectures for ADAS and AD functions.
Hello Lucas, Gabi and Christian! You have been the main contributors to the second report increment of The Autonomous Working Group Safety & Architecture. Can you tell us more about your work and its relevance to the final reference solution?
Lucas Fryzek (Director of Global Field Application Engineers at CoreAVI): Well, first, I have to say that all my contributions have been a team effort after the many discussions we’ve had inside the working group. The main areas I contributed to were the KPI at the architecture level and the architecture description for majority voting. My work on the KPI section was focused on articulating what we, as the Working Group, decided was important in evaluating the architecture we were reviewing. My work mainly consisted of internally reviewing the approach many of our customers take in the aerospace world regarding majority voting and re-reading and citing the de-facto papers that describe safe approaches to majority voting.
Gabi Escuela (Functional Safety Manager at BASELABS): We identified and analyzed several published system architectures for ADAS and AD functions for the second report. The goal was to understand their safety mechanisms at a conceptual, high level to enable a subsequent evaluation. I focused on one of these architectures, a distributed approach based on diverse monitoring components, each responsible for detecting and handling specific unsafe modes. Some of the principles underlying this candidate architecture will most likely be included in the reference solution.
Christian Mangold (Functional Safety Manager at TTTech Auto): With 10+ years of experience in the topic of Functional Safety and an eye for detecting deficiencies, my initial task was to review various channels in the report and consolidate with the authors existing findings of external reviewers. Through these activities, I contributed to making sure that the final reference solution is based on a sound argumentation that is not only in line with the approaches of ISO 26262 but also clearly documented in the final report for readers with different backgrounds.
What was the biggest challenge so far when working on your task? Did you involve other team members to overcome this challenge? If yes, what was your experience?
Lucas: My biggest challenge with the working group was ensuring we reviewed and captured all viable architectures for an autonomous vehicle system. As a group, we scoured published materials, reached out to industry leaders, and made public calls for industry experts to contribute. We could confidently summarize the viable approaches into three main architecture categories by examining all these sources.
Gabi: The biggest challenge for me was figuring out how the architecture candidates would handle the different unsafe conditions and situations, mostly without having all the necessary information. We had several discussions on this topic and had to make assumptions to understand the different approaches and their pros and cons. In any case, I enjoy these analyses and feel like playing with a puzzle!
Christian: Coming to a unified solution from very different opinions from various stakeholders was the most complex task for me. But in the end, it did not really feel so difficult because of the very cooperative and open-minded mentality I experienced in the Working Group. I enjoyed every single discussion I had with the other members.
After each report increment, we are inviting selected external experts to a review round. How did you use this external feedback?
Lucas: I believe the external feedback provided two key advantages for the Working Group. Firstly, they provided a reader’s perspective and offered suggestions to improve the depth of our arguments. There have been several instances now where we have not gone into enough detail to justify our points, and the external experts reviewing our materials have caught that and shown us where our arguments lacked depth. Second, the external experts provided valuable opinions for areas outside our expertise. For example, through external experts, we can get valuable OEM insights or pointers to some cutting-edge research we may not have reviewed yet. Both these points of understanding have been invaluable in improving the quality of the report.
Gabi: Our reviewers give us a lot of helpful advice! I am very happy about this support because the goal we want to achieve is very challenging. We discuss these findings, which usually leads to expanding our ideas and incorporating enriched arguments into the report. For each report section, a main person edits the corresponding content and coordinates the feedback activities. Critical feedback is discussed and agreed upon in plenary sessions with all members.
Christian: The feedback of renowned external experts was taken into account finding by finding. Wrong statements were corrected, unclear parts were reformulated, inconsistencies were consolidated, and strategic advice was discussed among Working Group members.
Thanks for reading and getting to know some of the Working Group Safety & Architecture members.
What’s next?
Now we have reached the most important stage of our Working Group Safety & Architecture – the evaluation of the architecture candidates. We invite The Autonomous community to join our Working Group in order to contribute to this crucial evaluation process and validate how the pre-selected architecture candidates will perform against the KPIs. Only close collaboration can solve the most pressing safety challenges posed by autonomous driving.
OEMs and technology companies with system-level expertise in functional safety and ADAS / AD fail-operational architectures are welcome to help us strengthen the results of our final reference solution.
Join us and become an active member of our Working Group Safety & Architecture!